当今各大厂商都纷纷推出智能汽车,但真正考量一个车是不是智能的关键就是智能驾驶能力!随着华为宣布全国开启不依赖高精地图的城区高阶智驾,小鹏提出了243城都能开,一众友商也都是开足马力,比学赶帮超。智能驾驶似乎已经进入了一个全新的无图时代。 从之前的“开城”大赛,到现在的全国无图,到底是什么原因让各大车企选择跟进梭哈这个常人并不是太懂的无图领域呢?有图和无图的区别到底在哪?
有图依靠“钞”能力 无图依靠强大算力 有图和无图是完全两种不同的技术路线。有图智驾需要依托高精地图提供精确到厘米级的道路信息(如车道线的位置、类型、宽度、坡度和曲率,交通标志、红绿灯、障碍物等等),来帮助车辆进行路线的规划和智驾行为。说白了就是让车辆沿着地图中的那条精细无比的路径通行。但是这样的解题思路实在太烧钱了! 你知道吗?高精地图的测绘是一个非常复杂、繁重的工作,以至于每天每车只能测绘100公里左右,且每公里成本高达千元。而且在基建狂魔的“中国速度”之下,可能今天刚测绘过的道路,一周以后就变样了。同时,它也会严重制约车企智驾能力的体现,因为有图才可以,图变了,还得等新版地图了。 无图智能驾驶就不同。不再依赖高精地图,全国都能开也就顺理成章了。但是,脱离了高精地图就需要依靠更强的感知能力、更先进的算法和更强大的算力,这对车辆自身智驾系统的要求就更高了。
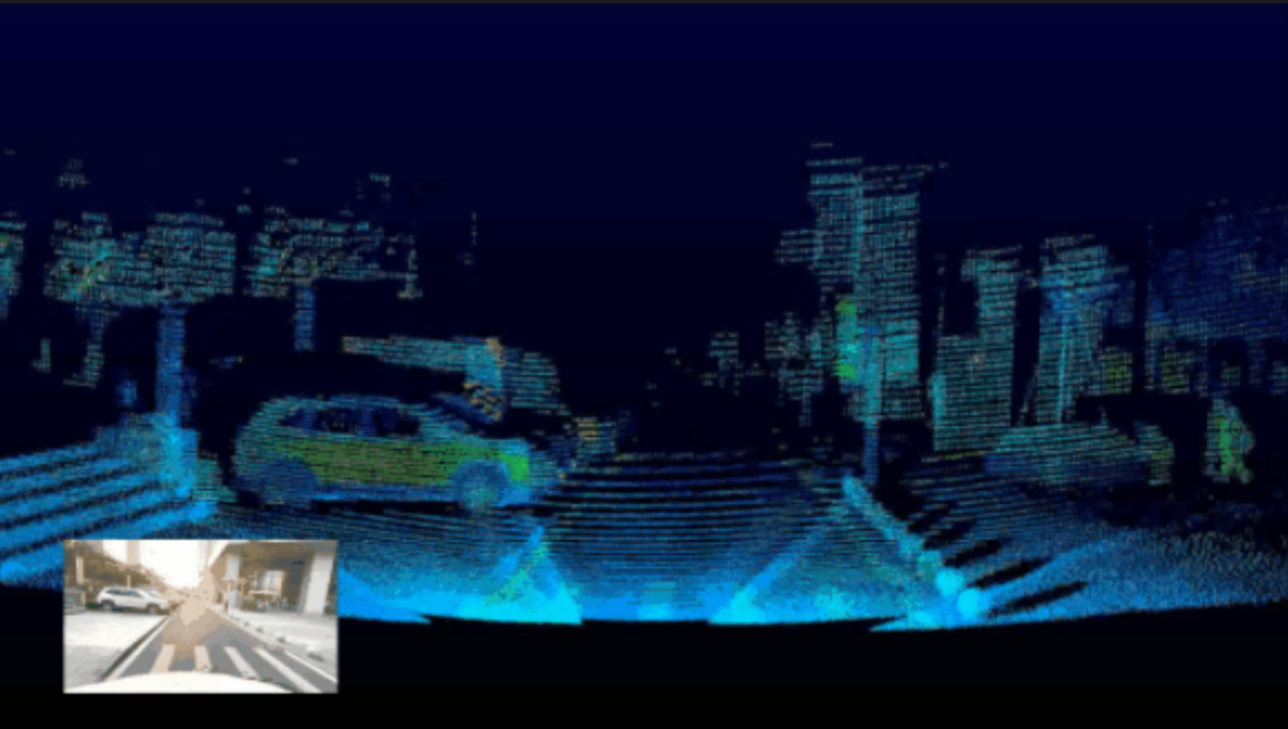
全国无图,华为是怎么又一次领先行业的 1.看得清 看得远 激光雷达依然是最佳方案 无图智驾目前主流的技术分为两大派别,激光雷达派和纯视觉派。目前最主流的高阶智驾依靠激光雷达,线程越多、扫描频率越高、探测越远的高性能激光雷达意味更加清晰的监测能力和更敏捷的反应速度。 所以那些非常网红的闪躲事件、拯救多个家庭的实战案例,直接证明了高性能激光雷达的硬实力。黑夜、逆光等环境更是这种强感知原件的优势所在,精细且大量的信息对算力和算法也有着更高的要求,所以搭载激光雷达的智驾车型不仅成本高,研发层面的软实力也不容忽视。 另一方面是以大疆和百度系为主的视觉系智驾方案,2D的视频内容相对来说对算力算法的要求没有那么苛刻,当然在诸多的实战环节,视觉系的智驾方案也没有带来多少高光时刻,说明二者在实际使用体验上还是存在一定差距的。更不用说摄像头容易受天气和强光的影响,这是客观实际。
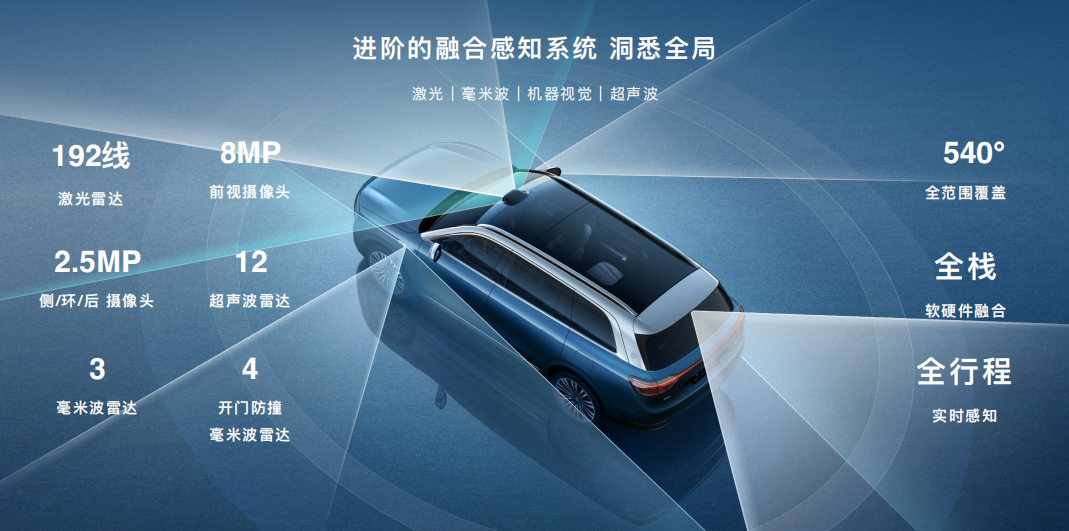
华为在系统硬件上就表现出了一种首屈一指的态度,采用了激光雷达、毫米波雷达、超声波雷达和视觉感知摄像头的多传感器融合感知方案。与纯摄像头最明显的区别是,激光雷达可以快速准确地获取周围环境的3D结构信息,且主动发光的特性也完全不受环境光线的影响。加上毫米波雷达、超声波雷达的探测和摄像头进行融合感知,为车辆提供了更远、更精确的3D环境信息。
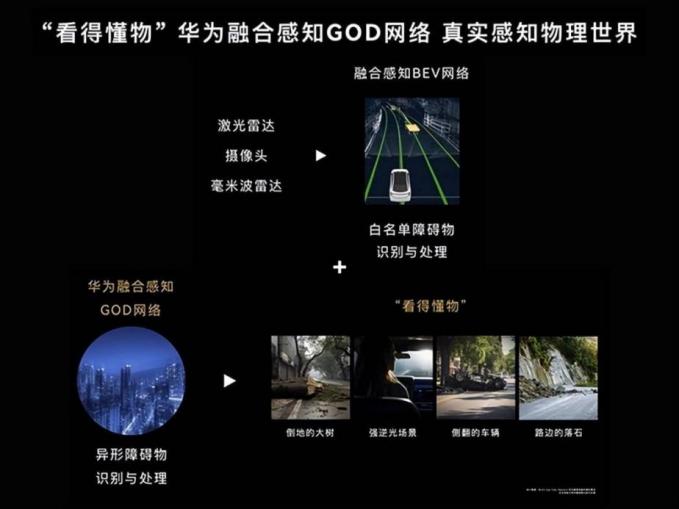
而华为自研的融合感知系统将各种类型传感器深度融合调度,全栈自研也让各系统的沟通没有障碍,保证了各种传感器在数据上的顺畅沟通。 2.树枝也能躲得开 GOD网络不需要“白名单” 要实现对车辆的精准控制,智驾系统需要看得清楚和明白车外的环境——既要看得见,也要看得懂。以前比较常用的技术是BEV+白名单的方式,感知环境的同时利用提前输入到系统内的白名单,去判断探测到的物体是什么,如白名单里正常走路的行人、行驶的电瓶车等,识别后去判断是不是需要躲避。 这种技术的弊端也是比较明显的,需要不断让机器学习“障碍物类型”来丰富白名单,若碰到一些不在白名单里的物体(特别是不常见的异形障碍物),系统就会判断成一种不明情况,也是迟疑、犹豫、危险的智驾行为的问题根源。
而华为GOD2.0网络(通用障碍物检测)就解决了类似的问题。类似于“我的世界”游戏,GOD网络将所有探测到的物体,全部理解成一个个3D立体的区块。这样系统就可以很容易的判断行车路线上的障碍物,比如行人、汽车等等;而如掉落的纸箱、倒地的大树、施工的路障等不常见的异形的障碍物,也能高效识别出来。也就是说,在GOD2.0网络的认识里,不管具体是什么物体,只要占用了这个区块空间,影响了行车通过,就是需要注意或规避的障碍物。因此脱离了白名单的束缚,就不会再有“认不清”或者“看不懂”的情况发生。
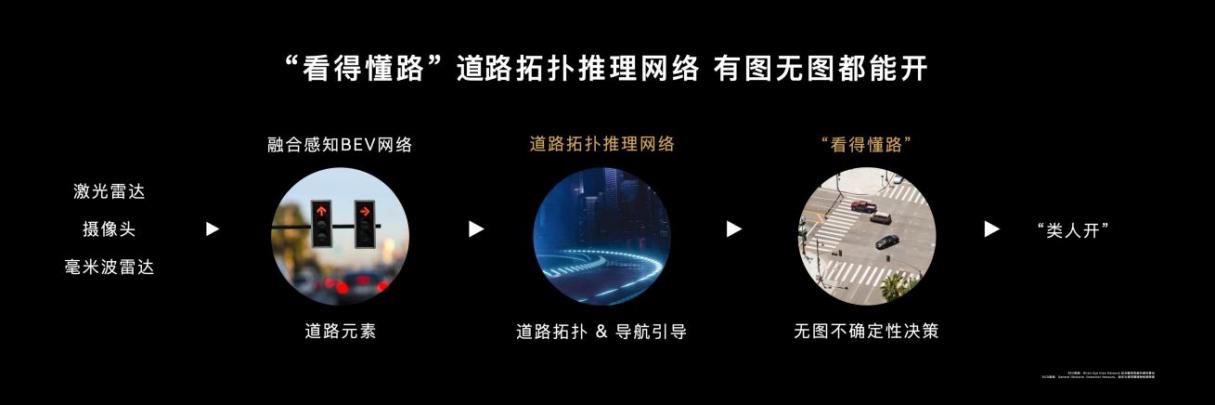
3.能识“物” 更能识“路” RCR技术让无图落地 有了GOD2.0技术,让华为智驾实现了看得懂“物”,当然还需要让系统看得懂“路”。对道路的精确感知也是脱离高精地图所必备的条件,像复杂路口、乡间窄路或者无标志标线的道路等,对无图智驾的系统处理能力就会有更大的考验。 而华为智驾可以结合普通导航地图,再通过RCR网络推理,构建相当于2.5个足球场大小的道路拓扑图。简单解释就是自己直接给自己的行车路线绘制了一幅专属地图,让智驾系统轻松理解现实的道路信息。再也无需高精地图,而实现有路就能开!
4.数据多更要算得快 MDC芯片轻松驾驭L5级驾驶辅助 有了传感器感知,又实现了看得懂“物“和”路“。下一步就是要将这些信息汇总、分析、计算,最后智能地控制车辆。要知道,众多传感器的数据量不容小视,同时还要在极短时间之内进行运算和处理。所以,高算力也是智驾的必备条件之一。 华为智驾系统采用了自研MDC系列芯片,算力超英伟达Orin,能进行高效处理各类传感器传来的信息。同时,华为智驾系统并没有做那种无脑地”堆料“。按照目前MDC硬件平台的算力来看,已经可以完全支持L3到L5级别的自动驾驶辅助了。 所以,纯粹堆算力除了增加购车成本外,对于用户来说也没有什么好处。毕竟买车是为了开,而不是看着配置单自嗨。 5.五天跑完全球道路 华为车BU算力中心国内无人能及 至此摆脱了高精地图的束缚,但要变成“轻车熟路”的老司机,就需要去积累更多的驾驶“经验“。早期的智驾系统的数据采集基本上都依靠真车在路上跑。而目前主流的做法是让AI建模,通过AI大模型进行云端“跑图”,而华为在这一方面又一次做到了全面领先。
华为云算力中心以国内全行业领先的2.8EFLOPS云算力跻身于行业的前沿。这一庞大的云算力支持为华为智驾带来了巨大的优势。该系统借助盘古大模型搭建的云端场景库,每天都在进行超过1200万公里的仿真道路测试,记住是每天1200万公里。虽然这些数字可能不太直观,但是你知道吗全球的道路总长度约为6400万公里,也就是说,华为的系统只需要5.3天就可以覆盖全球的每一个角落。大量的仿真测试会让智驾系统成为一个真正的“老司机”。
从有图智驾到无图智驾,用户体验到的是全国哪里都能开的带来的更轻松的出行体验,为技术买单,不让消费者败兴而归。在这背后则是多个系统完美结合所诞生的黑科技。 华为凭借着全栈自研硬件、丰富的数据资源、对技术创新的不断追求以及前瞻性的技术理念,率先推出全国无图智能驾驶。作为用户来说,我们不用再等待高精地图的“开城“,也不用担心各种情况导致的“智驾”变“智障”的降级体验。
这样的智驾系统才使得新能源汽车成为真正好用的、安全的智能汽车。华为在智能驾驶领域展现出了领先一代的、独一份的能力,不但让用户感受到好用安全的智慧出行体验,更树立了智驾领域的新标杆。 |


Archiver|燕赵车网 版权所有:石家庄新动力文化传播有限公司 ( 冀ICP备10010043号-25 )
GMT+8, 2024-11-24 05:53 , Processed in 0.036403 second(s), 18 queries .
Powered by autoheb.net X2
© 2001-2011 autoheb.net